Who's this for?
You're are working on a robotic application i.e. a mobile robotics platform and the hardware is not yet available. Or maybe you only have one or two prototypes available but multiple software-engineers who need to access those highly-contested prototypes in order to verify and test their algorithms. Even if there are enough robots available for every engineer software deployment and test set-up is often a cumbersome and time-consuming process and you want to speed up your software development.
Whatever your particular issue - simulating your robot using Gazebo removes availability bottlenecks and allows for increasing development velocity.
What do we do?
I offer a large variety of consulting services around Gazebo including but not limited to
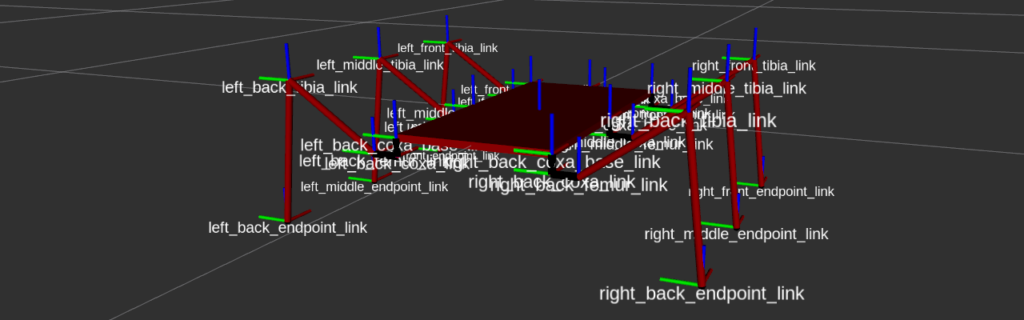
- Initial set-up of a Gazebo simulation for your robotic application
- URDF, SDF, Mesh generation, ...
- ROS / Gazebo integration: exchange date between ROS and Gazebo
- Gazebo plugin development: although a large variety of Gazebo plugins for performing actions such as joint position control sometimes it is necessary to develop ones own Gazebo plugin to achieve a certain application-specific functionality.
- Gazebo classic migration: Gazebo 11 is the last major release of Gazebo (now 'Gazebo Classic') and reaches end-of-life on January 29th, 2025. I can migrate your existing Gazebo simulation and models from Gazebo classic to the new Ignition Gazebo simulator (now 'Gazebo').
Why me?
I have been professionally working with Gazebo, generating robot descriptions using URDF and SDF, writing your own Gazebo plugins and in general navigating the jungle that is composed of many different Gazebo versions each with their own intricate caveats and hard-to-find documentation. Having been through this process a couple of times I've learned how to do this the hard way. Instead of your engineers spending a lot of their time scratching their heads and puzzling over how-to setup a Gazebo for your robotics platform let me help you with my hard-earned knowledge so that your engineers can focus on the specifics of your application.
Still have questions?
What happens after I apply?
I will review your application and reply by email, typically within one business day, with any immediate follow-up questions, and to schedule a preliminary conversation to uncover your specific needs.
I still have more questions that I’d like to ask before applying.
Don't worry. Please go ahead and complete the form below and let me know about what further questions you have.
To book a gazebo consulting engagement or to learn more about how it could help you, fill out the form I’ll get back to you ASAP with details on how to proceed. If you rather prefer to send me an email, feel free to use the button/address below the form.
or
or
Don’t worry, there’s no risk or obligation and it’s free to apply.